2.5.2. Реле направления мощности
2.5.2. Реле направления мощности
Для того чтобы определить направление мощности, передаваемой по контролируемой электрической сети, в месте установки защиты используют специальное реле — реле направления мощности. Отечественная промышленность выпускает реле направления мощности двух видов: индукционные (серий РБМ-170 и РБМ-270) и микроэлектронные (типа РМ-11 и РМ-12) [3].
Индукционное реле направления мощности [2, 3] имеет две обмотки, размещенные на полюсах замкнутого стального магнитопровода 1 (рис. 2.17). Одна из них, токовая (4) включается во вторичные цепи ТТ, и ток в ней (Ip) определяется вторичным током ТТ. Вторая — потенциальная (5) — подключается ко вторичной обмотке трансформатора напряжения (ТН), и ток в ней (IH) пропорционален подведенному напряжению (UH). Между полюсами расположен внутренний стальной сердечник 2 цилиндрической формы и алюминиевый ротор 3, имеющий форму стакана. На роторе укреплен контактный мостик 6. При направлении мощности КЗ от шин в линию этот мостик замыкает неподвижные выходные контакты 7 (реле срабатывает). Возврат реле происходит под воздействием противодействующей пружины 8.
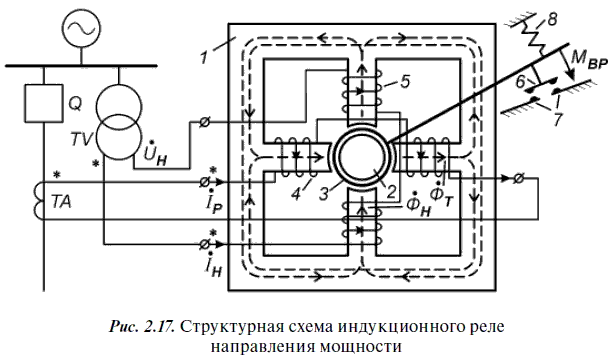
Магнитные потоки, создаваемые катушками с соответствующими токами, сдвинуты в пространстве на угол 90°. Взаимодействие потоков с токами, индуктированными ими в роторе, создает вращающий момент, который заставляет ротор поворачиваться. Если магнитные потоки имеют синусоидальную форму, то вращающий момент МВР ~ ФI ? ФU ? sin?. Здесь ФI и ФU — магнитные потоки, создаваемые токовой и потенциальной катушками соответственно; T — электрический угол между магнитными потоками ФI и ФU.
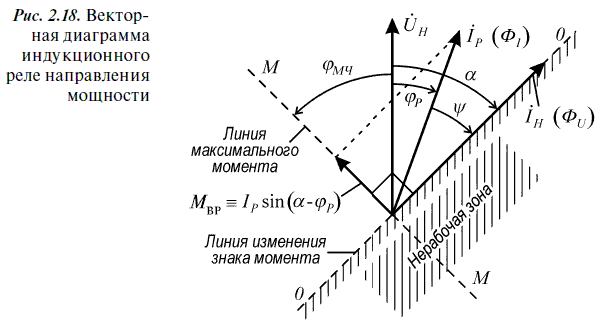
На рис. 2.18 показана векторная диаграмма, поясняющая принцип действия реле. Приняты следующие обозначения: ?p и ?H — векторы тока и напряжения, подведенных к реле; ?р — угол между векторами ?p и ?H, определяемый параметрами силовой электрической сети и схемой включения реле; ?H — вектор тока в потенциальной катушке реле; ? — угол между векторами ?H и ?H (угол внутреннего сдвига), определяемый соотношением активного и реактивного сопротивлений цепи потенциальной катушки.
Учитывая, что ФI ~ Ip, ФU ~ IH ~ UH, а ? = ? — ?р, можно получить:
MBP = kp ? UH ? IP ? sin (? — ?р).
В этом выражении kp — постоянный коэффициент, определяемый параметрами реле, а UH ? Ip ? sin (? ? ?р) = Sp — мощность на зажимах реле. Следовательно, вращающий момент реле пропорционален мощности: MBP = kp ? Sp, то есть реле реагирует на мощность.
Вращающий момент реле равен нулю, когда sin (? — ?р) = 0. Отсюда следует, что MBP = 0, если ?р = ? при отставании и если ?р = (? + 180°) при опережении вектором ?p вектора ?H. Линия, расположенная под этим углом к вектору ?H, называется линией нулевых моментов или линией изменения знака момента [2, 3].
Угол ?р между векторами ?P и ?H, при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности ?МЧ. Линия, расположенная к вектору ?H под углом ?МЧ, называется линией максимального момента.
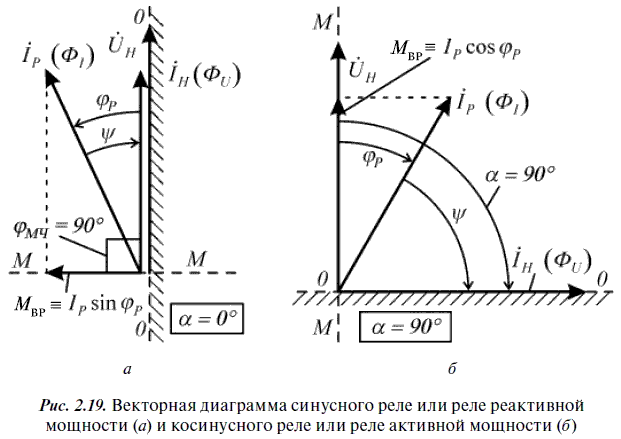
Если внутренний угол ? = 0 (рис. 2.19, а), то вращающий момент MBP = kp ? UH ? Ip ? sin (??р) в реле пропорционален реактивной мощности, подведенной к реле (синусное реле или реле реактивной мощности). Эти реле выполняют так, что MBP положителен, если угол ?р < 0 (то есть MBP = kp ? UH ? Ip ? sin ?р). Угол максимальной чувствительности для синусного реле ?МЧ = 90°.
Если внутренний угол ? = 90° (рис. 2.19, б), то вращающий момент
MBP = kp ? UH ? IP ? sin (90 ? ?р) = kp ? UH ? IP ? cos ?р
пропорционален активной мощности, подведенной к реле (косинусное реле или реле активной мощности). Для косинусного реле ?МЧ = 0°.
В реле смешанного типа (см. рис. 2.18) угол а может иметь значения от 0° до 90°. У отечественных реле смешанного типа (РБМ-171, РБМ-271) угол а изменяется дискретно: ? = 45° (?МЧ = 45°) или ? = 60° (?мч = 30°).
Срабатывание реле направления мощности происходит при выполнении условия:
MBP ? МПР,
где МПР — противодействующий момент, который определяется силой противодействия возвратной пружины, трением в подшипниках реле и силой нажатия контактов при срабатывании реле.
Поскольку вращающий момент реле пропорционален подведенной к нему мощности, то реле срабатывает при определенном произведении UH ? Ip. Минимальное значение мощности на зажимах реле, при котором оно срабатывает, принято называть мощностью срабатывания реле SCP. Для большинства индукционных реле SCP = (0,2 ? 4) B ? A.
Чувствительность реле оценивается по вольт-амперной характеристике, которая представляет собой зависимость напряжения срабатывания реле от тока (рис. 2.20, а), при неизменном угле между векторами ?H и ?p равном углу максимальной чувствительности [3].
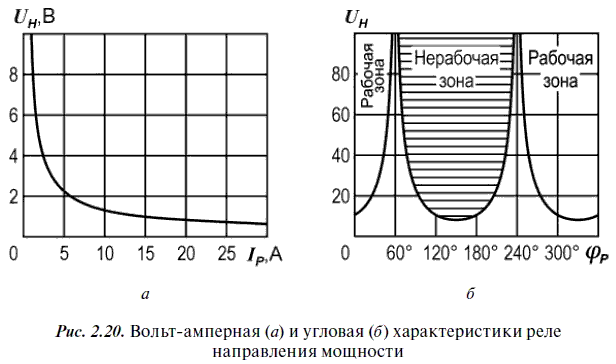
Зависимость мощности срабатывания реле от угла между векторами ?H и ?p при неизменном токе принято называть угловой характеристикой реле (рис. 2.20, б) [2]. Она определяет зоны срабатывания и несрабатывания реле. Как видно, при углах, соответствующих изменению направления вращающего момента, мощность срабатывания возрастает и стремится к бесконечности. При ?р = ?МЧ мощность срабатывания реле имеет минимальное значение.
Принцип действия микроэлектронных статических реле направления мощности РМ-11 и РМ-12 основан на измерении длительности интервалов времени, при котором напряжение и ток, подведенные к реле, имеют одинаковый знак. Время совпадения знака сигналов измеряется в течение каждого полупериода и сравнивается с уставкой. При определенной продолжительности времени совпадения знаков сигналов реле срабатывает. Эти реле превосходят индукционные по многим основным характеристикам и широко используются в системах релейной защиты [3].
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Реле
Реле Реле – это прибор, который реагирует на дифференциацию каких-либо параметров установки и воздействует на исполнительный аппарат за счет местного источника.Разновидности реле1. Реле автоматики – устройство, которое реагирует на какое-либо определенное значение
Реле
Реле Реле (франц. relais) – вспомогательная часть электромагнитного телеграфного аппарата. Слабый гальванический ток, придя по проводу к станции, действует на Р., который замыкает уже местную гальваническую батарею; ток ее, более сильный, чем ток, пришедший к Р., действует на
Вар (единица мощности)
Вар (единица мощности) Вар, вольт-ампер реактивный, единица реактивной мощности переменного тока Q =UIsinj , где j — сдвиг фаз между током I и напряжением U в цепи синусоидального переменного тока (см. также Вольт-ампер ). В. обозначается вар или var. Различие в размерах В. и
6. Пневматические переключатели давления (реле уровня)
6. Пневматические переключатели давления (реле уровня) Важной деталью во всех моделях СМА является пневматический переключатель. Он служит для контроля уровня воды или моющего раствора в баке СМА, поэтому его часто называют датчиком, или реле уровня, или прессостатом, но
2.6.2. Расчет числа витков обмоток реле РНТ-565 и ДЗТ-11
2.6.2. Расчет числа витков обмоток реле РНТ-565 и ДЗТ-11 Определяется ток срабатывания реле для стороны ВН: Рассчитывается и округляется в меньшую сторону число витков уравнительной обмотки на стороне ВН (первой, см. рис. 2.26): где FCP — магнитодвижущая сила, необходимая для
Приложение 6 Параметры реле
Приложение 6 Параметры реле Таблица П6.1 Таблица П6.2 Уставка электромагнитного элемента реле может устанавливаться в пределах (2–8) тока срабатывания индукционного элемента реле.Коэффициент возврата всех реле не менее 0,8.Мощность, потребляемая реле при токе уставки,
16.35. Ремонт скутера. Реле стартера — замена
16.35. Ремонт скутера. Реле стартера — замена СНЯТИЕДля демонтажа реле стартера необходимо сначала снять заднюю часть облицовки скутера (см. Облицовки — снятие и установка).1. Шестигранным ключом отворачиваем болт крепления реле стартера. 2. Снимаем с реле стартера