1.2.2.4. БПЛА с машущим крылом
1.2.2.4. БПЛА с машущим крылом
БПЛА с машущим крылом (flapping-wing UAV) основаны на бионическом принципе – копировании движений, создаваемых в полете летающими живыми объектами – птицами и насекомыми.
Хотя в этом классе БПЛА пока нет серийно выпускаемых аппаратов и практического применения они пока не имеют, во всем мире проводятся интенсивные исследования в этой области. В последние годы появилось большое количество разных интересных концептов малых БПЛА с машущим крылом.
Главные преимущества, которые имеют птицы и летающие насекомые перед существующими типами летательных аппаратов – это их энергоэффективность и маневренность. Если разработчикам "машущих" БПЛА удастся по показателям энергоэффективности и маневренности приблизиться к тому, что уже имеется в живой природе, то тогда их усилия будут не напрасными, и можно ожидать, что этот класс аппаратов начнет находить свое применение.
Аппараты, основанные на имитации движений птиц, получили название орнитоптеров (англ.: omithopter), а аппараты, в которых копируются движения летающих насекомых – энтомоптерами (англ.: entomopter) [43].
Орнитоптеры.
При создании БПЛА, имитирующих движения птиц, много внимания уделяется механическому приводу крыльев. Механические передачи должны обеспечивать необходимый набор движений и при этом быть простыми и легкими. Кроме махов вверх/вниз с нужной частотой, система управления движением в подходящие по внешним условиям моменты должна реализовывать режим парения, для того, чтобы аппарат мог максимально эффективно использовать набегающие и восходящие потоки воздуха.
Показательным примером в этой области является БПЛА SmartBird германской фирмой Festo, которая известна своими разработками в области бионики. Созданный ей аппарат внешне действительно очень похож на птицу (рис. 1.56). Он выполнен по образу и подобию реальной птицы – серебристой чайки, но несколько крупнее ее по габаритам. Аппарат способен не только собственно летать, но и совершать самостоятельные взлет и приземление. Крылья SmartBird движутся не только вверх и вниз, но также и поворачиваются вокруг собственной оси, что обеспечивает движениям максимальную точность.
БПЛА SmartBird имеет длину 1 м, размах крыльев 2 м, массу 450 г. Питание осуществляется от литий-полимерной двухэлементной аккумуляторной батареи (7,4 В). Потребляемая мощность в режиме выполнения маховых движений всего 23 Вт, в режиме парения еще меньше – 18 Вт.
Аппараты, подобные описанному, в скором времени вполне смогут найти свое место на рынке БПЛА. Военные ведомства различных стран уже оценили очевидные достоинства этих аппаратов при выполнении разведывательных и диверсионных операций.
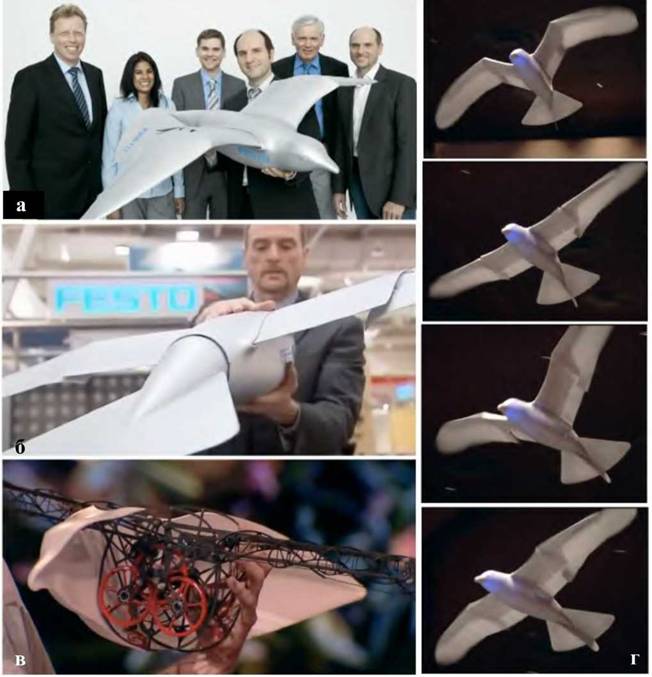
Рис. 1.56. Орнитоптер SmartBird компании Festo (Германия, 2011): а – создатели аппарата; б – вид сзади; в – демо-макет механических передач; г – различные фазы полета
Энтомоптеры.
БПЛА, имитирующие движения летающих насекомых, условно можно подразделить на имитаторы четырехкрылых и имитаторы двукрылых насекомых. Четырехкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и возможностей управления полетом у них гораздо больше. На рис. 1.57 показан пример четырехкрылого энтомоптера, разработанного компанией Festo.

Рис. 1.57. Эитомоитер Вionicopter компании Festo (Германия, 2013)
Длина корпуса аппарата составляет 44 см, размах крыльев 63 см. Крылья выполнены из углеродного волокна и полиэфирной плёнки. Показатель частоты взмахов крылом относительно невысокий – 15-20 Гц. Масса аппарата составляет всего 175 г.
Управление полётом робота осуществляется со смартфона. BionicOpter имеет встроенный ARM-микроконтроллер, обеспечивающий стабилизацию полёта. Аппарат оснащен одним основным электродвигателем и восемью сервоприводами. На борту имеется набор сенсоров для предотвращения столкновений с препятствиями. Схема питается от двухсекционного литийполимерного аккумулятора 7,4 В.
Конструкция BionicOpter обеспечивает этому аппарату множество возможностей маневрирования. Каждое крыло, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести. Благодаря таким возможностям управления, аппарат может, например, мгновенно зависать на месте и перемещаться в горизонтальной плоскости в любую сторону, не изменяя при этом угла тангажа.
Разработки БПЛА, имитирующие двукрылых насекомых, развиваются, в основном, в направлении микроминиатюризации аппаратов. Здесь все достижения, видимо, еще впереди. Развитие технологий новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные насекомоподобные БПЛА, приближающиеся к живым существам и по выполняемым функциям, и по размеру. Появятся (уже появляются) новые концепции управления коллективами микророботов, перед которыми можно будет ставить цели, ранее не достижимые, т.к. эти формации воздушных микророботов будут обладать большими возможностями в силу таких их качеств, как коллективная живучесть, способность многовариантного решения задач, незаметность перемещений, способность к массированным и непрерывным миссиям и т.д.
Пример разработки миниатюрного двукрылого энтомоптера показан на рис. 1.58. Это микро-БПЛА Mobee (Monolithic Bee), разработанный Лабораторией микроробототехники Гарвардского университета (США). Его особенность в том, что он изготовлен по интегральной многослойной технологии. В основе – тонкая углепластиковая пластина, в которой лазером сделаны все необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев [44].
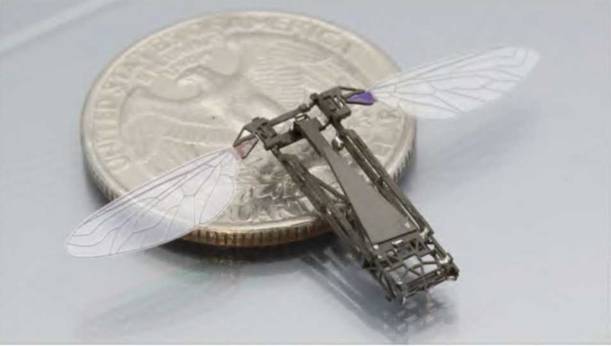
Рис. 1.58. Энтомоптер Mobee – разработка Harvard Microrobotics Lab (США, 2011)
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Робот-вертолет БПЛА
Робот-вертолет БПЛА Российская компания KVAND разработала малогабаритный беспилотный робот-вертолет. Он может применяться для исследования местности, проводить слежение за газо– и нефтепроводами, вести поисковые работы. Он способен развивать свою скорость до 150 км/ч
Самолет с косым крылом
Самолет с косым крылом Еще в 40-х годах прошлого столетия аэродинамики выяснили, что самолет с несимметричным, косым крылом может оказаться лучшей формой машины для сверхзвукового полета. С тех пор аэродинамики время от времени экспериментируют с подобными
Взлететь, взмахнув крылом…
Взлететь, взмахнув крылом… Изобретатели издавна мечтали летать подобно птицам, приводя в действие крылья своими собственными мускулами. Началось все, наверное, со времен Леонардо да Винчи, в архивах которого обнаружены довольно подробные чертежи орнитоптера —
Взлететь, взмахнув крылом
Взлететь, взмахнув крылом Хорошо бы, выехав как-нибудь за город, достать из рюкзака и распаковать некий аппарат с крыльями. Затем надеть лямки подвесной системы, напрячь мускулы и... взмыть в небо. Да, неплохо бы иметь портативный му скул о лет, который позволял бы взлетать
1.2.2. Классификация БПЛА по принципу полета
1.2.2. Классификация БПЛА по принципу полета По этому критерию все БПЛА можно разделить на 5 групп (первые 4 группы относятся к аппаратам аэродинамического типа):1) БПЛА с жестким крылом (БПЛА самолетного типа);2) БПЛА с гибким крылом;3) БПЛА с вращающимся крылом (БПЛА
1.2.2.1. БПЛА самолетного типа
1.2.2.1. БПЛА самолетного типа Этот тип аппаратов известен также как БПЛА с жестким крылом (англ.: fixed-wing UAV). Подъемная сила у этих аппаратов создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило,
1.2.2.2. БПЛА с гибким крылом
1.2.2.2. БПЛА с гибким крылом Это дешевые и экономичные летательные аппараты аэродинамического типа, в которых в качестве несущего крыла используется не жесткая, а гибкая (мягкая) конструкция, выполненная из ткани, эластичного полимерного материала или упругого
1.2.2.3. БПЛА вертолетного типа
1.2.2.3. БПЛА вертолетного типа Этот тип аппаратов известен также как БПЛА с вращающимся крылом (англ.: rotary-wing UAV, rotorcraft UAV, helicopter UAV). Часто их называют также VTOL UAV (Vertical Take-off and Landing UAV) – БПЛА с вертикальным взлетом и посадкой. Последнее не совсем корректно, так как в общем случае
1.2.2.5. БПЛА аэростатического типа
1.2.2.5. БПЛА аэростатического типа БПЛА аэростатического типа (blimps) – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в
1.2.4. Классификация БПЛА по назначению
1.2.4. Классификация БПЛА по назначению Во многих классификациях по назначению БПЛА разделяют на военные и гражданские. Однако, видимо, более логичным является подразделение [63], в котором БПЛА подразделяются вначале по укрупненным сферам использования, а именно – для
2.4.4.2. Южнокорейские производители БПЛА
2.4.4.2. Южнокорейские производители БПЛА Korea Aerospace Industries Ltd. В 1999 г. под эгидой правительства Республики Корея была организована компания KAI, концентрирующая разработки и производство военной авиационной техники. В нее вошли аэрокосмические подразделения известнейших
2.5. Перспективы мирового рынка БПЛА
2.5. Перспективы мирового рынка БПЛА Приведенные справочные сведения по разработчикам и производителям БПЛА, конечно, не являются полными. К разработкам беспилотной авиационной техники подключается все большее количество стран и фирм. Ситуация в этой области быстро
3.3. Перспективные российские БПЛА
3.3. Перспективные российские БПЛА (по материалам [11])На российском рынке достаточно широко представлены БПЛА малого радиуса действия, предназначенные для полетов на небольших высотах. Разработкой подобных аппаратов занимается несколько компаний, они используются